RESEARCH PROJECTS
Robotic cable-based de-tumbling of space debris
Space debris is often tumbling prior to its capture and removal. Tethered methods of debris capture allow for a range of debris motion during de-orbit. However, control of the system is necessary. We are working on improving simulation capabilities, control algorithms, and system identification methods to enable autonomous tethered debris removal strategies.

Photo: ESA-David Ducros
Robotic net-based capture of targets
Tether-nets are a promising method to capture debris on orbit and dispose of it safely. The inherent structural flexibility of a net presents various under-explored operational paradigms, ranging from passive nets relying on entanglement to complex active solutions with maneuverable corner elements that are equipped with varying degrees of sensing and control capabilities. The overall goal of this research is to develop computational approaches to perform a formal exploration of the resulting distinct operational paradigms and associated design choices that are jointly effective at capturing different types of targets in the presence of uncertainty.
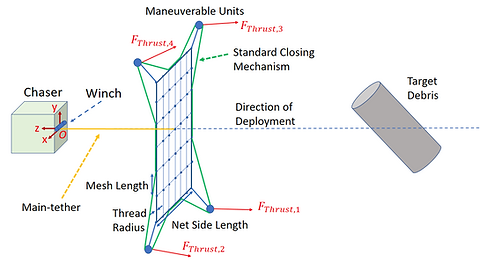
Net-based capture of space debris
Tether-nets are a promising method to capture debris on orbit and dispose of it safely. We are working on a number of topics in the area: Simulation of the dynamics and its validation, Control of the deployment and capture, determination of the success or failure of capture in an automated way, and post-capture estimation and control.

Low-thrust trajectory optimization
We are devising methods to solve non-planar low-thrust minimum-fuel spacecraft trajectory optimization problems with the indirect shooting approach, for example in the Circular Restricted Three-Body Problem.

Libration control of tethered satellite systems
We are using analytical methods, numerical simulation, and optimization to determine effective length rate control profiles for the retraction of km-long tethered satellite systems, which is otherwise a naturally unstable process.
